Grasp planning for anthropomorphic hands as they appear in humanoid robotics is a challenging topic due to the high dimensionality of the problem and the complexity arising from the wide variety of objects and tasks. I developed several grasp planning approaches related to single-handed and bimanual grasp planning together with my colleagues at the High Performance Humanoid Technologies lab (H²T), KIT, Germany. The resulting source code can be found in my C++ robotics toolbox library Simox.
-
High-Quality Grasp Planning using Mean Curvature Object Skeletons
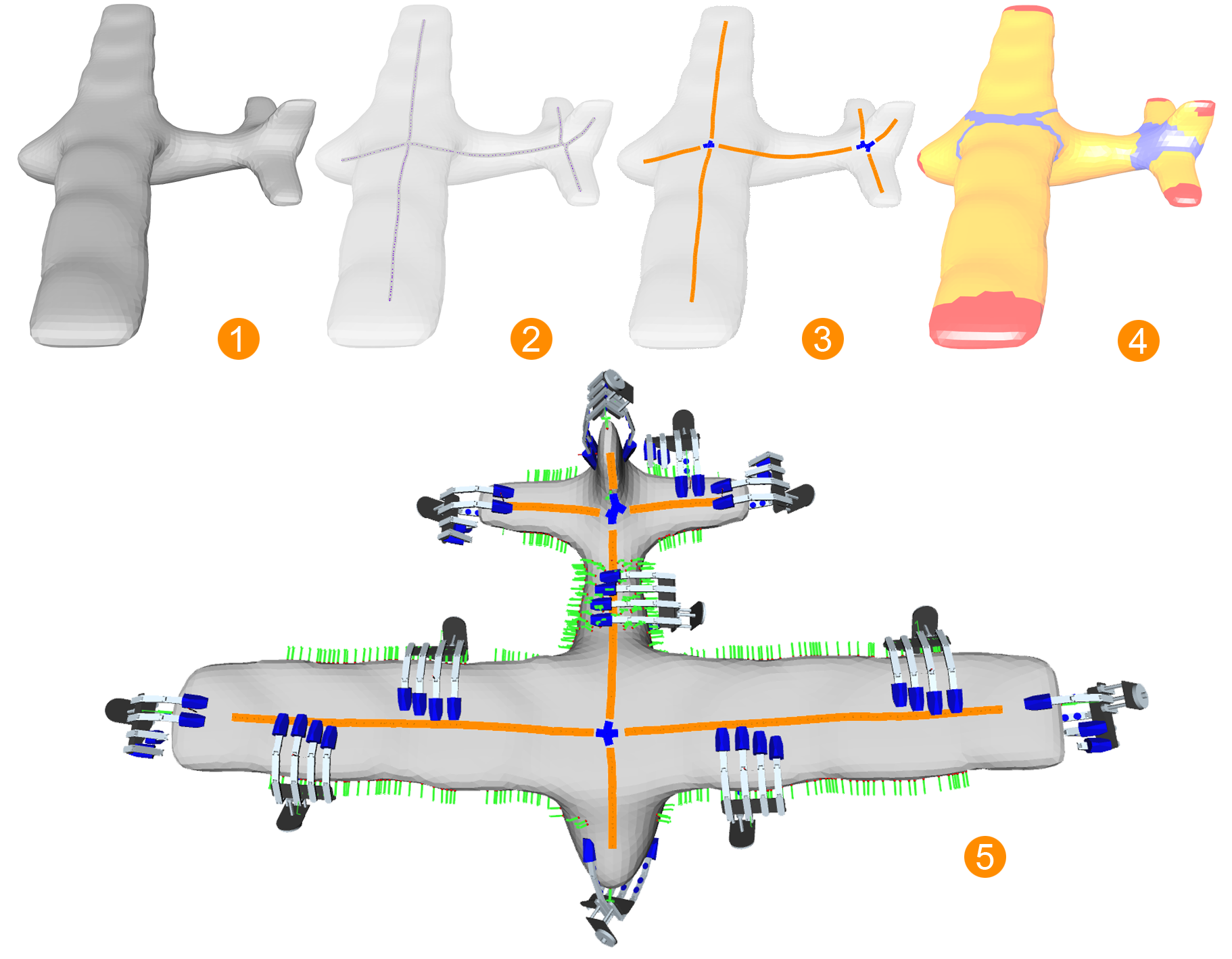
We developed a grasp planner which integrates two sources of information to generate robust grasps for a robotic hand.
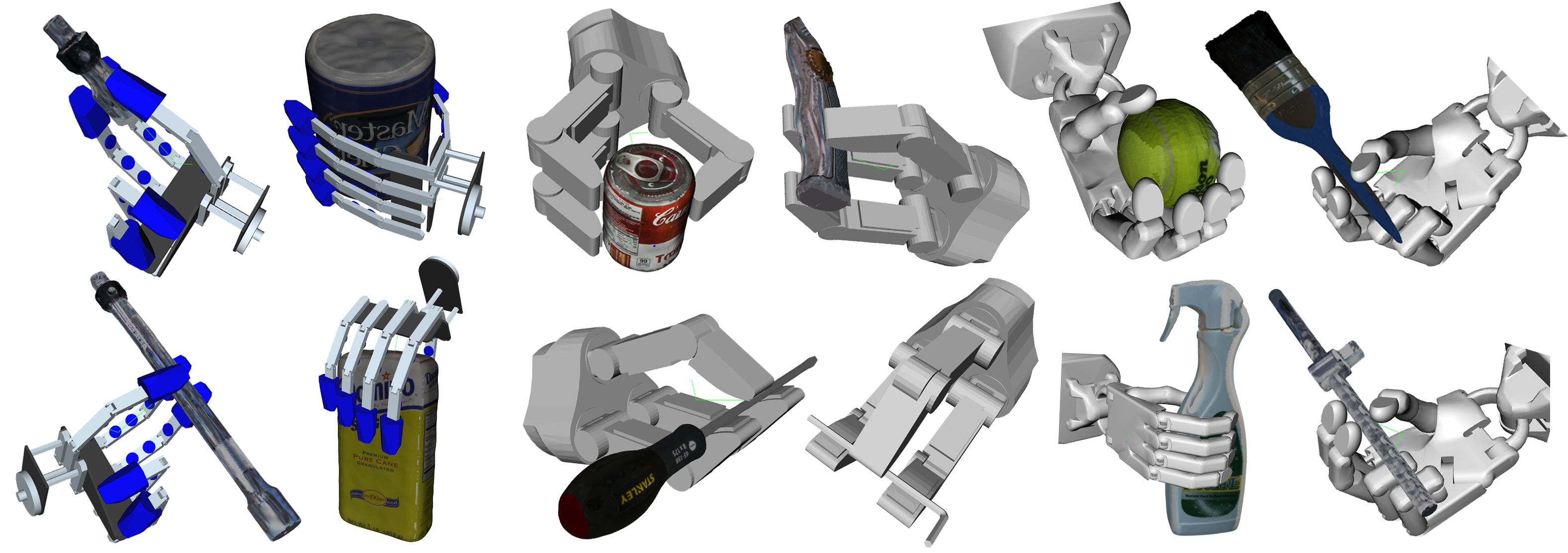
First, the topological information of the object model is incorporated by building the mean curvature skeleton and segmenting the object accordingly in order to identify object regions which are suitable for grasping. This information can be used to derive different grasping strategies, which also allows to distinguish between precision and power grasps. Second, the local surface structure is investigated to construct feasible and robust grasping poses by aligning the hand according to the local object shape. The approach has been applied to a wide variety of object models of the KIT and the YCB real-world object model databases and it has been evaluated with several robotic hands.
The results show that the skeleton-based grasp planner is capable to generate high-quality grasps in an efficient manner. In addition, the generated grasps are robust against hand positioning errors as they occur in real-world applications due to perception and actuation inaccuracies.
The publication can be found here.
A refernceimplementation based on Simox is provided at gitlab.
- Part-based grasp planning
In our work, we present a part-based grasp planning approach that is capable of generating grasps that are applicable to multiple familiar objects. More details can be found at IEEE-Xplore or here.
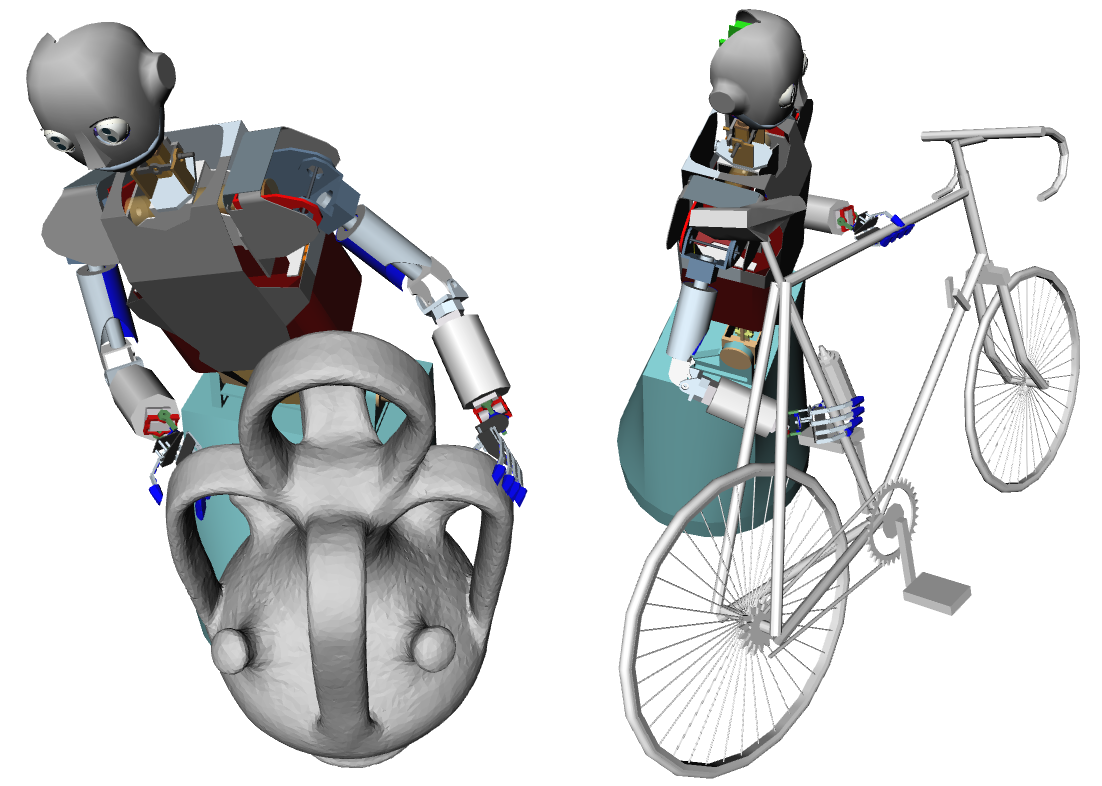
- Bimanual Grasp Planning
Based on the Medial Axis planning approach, we developed a grasp planner which is capable of generating bimanual grasps for a humanoid robot. The work is availabe here.