The robot software framework ArmarX has been developed at the High Performance Humanoid Technologies Lab (H²T), KIT. As part of the lead development team, I’m responsible for strategy and conception, the RobotComponents package, the robot simulation environment ArmarXSimulation, the generic ArmarXGUI package and the PlanningX package which includes all motion and grasp planning algorithms.
ArmarX Overview
|
|
 ArmarXSimulation |
 VisionX |
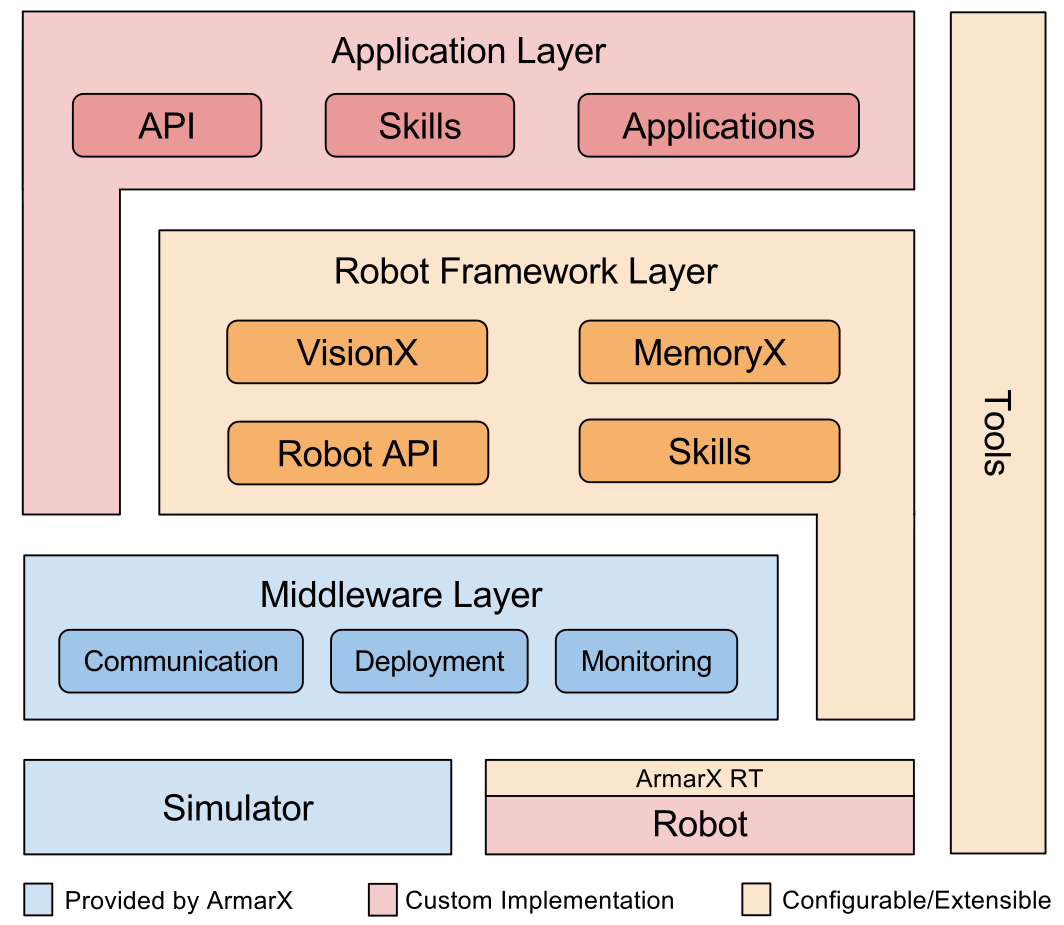
The robot development environment (RDE) ArmarX aims at providing an infrastructure for developing a customized robot framework that enables the realization of distributed robot software components. To this end, ArmarX is organized in three layers: the middleware layer which provides core features such as communication methods and deployment concepts, the robot framework layer which consists of standardized components that can be tailored to customize the robot software framework, and the application layer where robot programs are implemented. This layered architecture eases the development of robot software architectures by making use of standard interfaces and ready-to-use components which can be customized, extended and/or parametrized according to the robot’s capabilities and application. To support the development process ArmarX provides a set of tools such as plug-in-based graphical user interfaces, a statechart editor, and tools for online inspection and state disclosure.
More information can be found here: http://armarx.humanoids.kit.edu/
Main Publication:
N. Vahrenkamp, M. Wächter, M. Kröhnert, K. Welke and T. Asfour, The Robot Software Framework ArmarX, it – Information Technology. Vol. 57, No. 2, pp. 99 – 111, March 2015 [PDF][DOI]